横排-无底-140x48mm-04-1.png "前沿科技阵地")
竖排-无底白字-280x96mm-04.png "前沿科技阵地")

虽然今年被称为VR元年,但是行业对于虚拟现实的理解已经向着更深层次切入。人们不再局限于图像(视觉)、声音(听觉),而是开始向使人们真切感受真实的各个领域进行探索。微软研究院新体验与新技术部研究员Mar Gonzalez Franco在被问及“2027年,虚拟现实领域的重大进展或热门话题将是什么”时表示:与目前只能刺激视觉和听觉感官的虚拟现实系统相比,未来虚拟现实的体验将扩展到其它感官——其中包括通过触觉设备而获得的触觉。
力触觉反馈的重要性
一句话很难体现出VR力触觉反馈对于虚拟现实有多重要,我们不妨想象一下这些没有力触觉反馈的场景:
当你在虚拟现实中捡起物体,你的手指可能穿过它;
当你抓住一个重物,你感觉抓住的是泡沫;
当你用手指抚摸凹凸不平的钥匙,你并不能感觉到它的纹理;
当你扔一个球时,感受不到重量的你,无法将一个球丢入近在眼前的球筐

是不是感觉很诡异?这就是虚拟现实场景中力触觉反馈的价值。关于力触觉反馈,需要指出的是其包含两部分内容:基于皮肤真皮层和表皮层的触觉感受器诱发的触觉反馈,以及基于关节和韧带内的感受器诱发的力觉反馈。
当你在上述缺乏力触觉反馈的虚拟现实环境中游戏,会很难进入这个世界,甚至你会觉得厌烦,会有强烈的感官不适。我们通过触觉感受到的硬度、温度、形状、表面纹理等方面,在目前的虚拟现实中都无法得到完整展现。而逼真的虚拟现实系统应该包括三个本质特性,沉浸性、交互性、想象性。只有通过视、听、触等多个感觉的融合,才能够在与虚拟现实环境的交流过程中,体会到更好的沉浸性与交互性,最终实现“所见即所触”。
力触觉反馈机制
要在VR里获得触觉,无疑需要实现力触觉的反馈。而力触觉反馈的人机交互系统,主要由三方构成:使用者、力触觉设备、力触觉生成算法。整个过程大致是这样的:
1、使用者通过交互设备向虚拟环境输入力或者运动信号;
2、力触觉生成算法计算并生成使用者与虚拟环境中物体的力的交互;
3、虚拟环境给与使用者视、听、力或者运动信号的形式反馈。
力触觉生成算法是整个力触觉人机交互技术的软件核心,其重要性一如在VR、AR、AI领域扮演了极为重要角色的计算机视觉。而使用者则借助这套系统在虚拟现实环境中获得更为真实的体验。
在力触觉人机交互过程中,需要考虑以下因素:
1、高实时性(1000Hz的更新频率,每一毫秒将会有一个新的数据);
2、高逼真度(建模和仿真误差小于人的力触觉感知阈值,以及保证丰富多样的力学属性);
3、高稳定性(不稳定或者不正确的计算模型会导致体验的不真实,强烈震动可能给设备和使用者造成伤害)。
考虑上述因素,结合力触觉生成算法,能够为使用者提供更为逼真的体验效果。对于力触觉生成算法的研究在1994年便已开始,早期研究偏向于3自由度的力觉生成算法。在早期研究项目中,将虚拟化身视为一个点,它能够与虚拟环境交互产生3维作用力,并能够通过力触觉交互设备反馈给使用者。
但3自由度力触觉生成算法中存在一个问题,当虚拟化身与物体进行多点接触时会出现穿透障碍物的现象,它不能模拟与物体之间多点接触感受。与此同时,3自由度力触觉生成算法也无法模拟物体之间的交互力矩(力和力臂的乘积)。这导致了使用者力觉感受的不完整。

6自由度动感座椅
随着6自由度力觉反馈设备的出现,旨在解决复杂形状物体多点多区域不穿透的交互模拟的6自由度力觉生成算法提出。随着2008年系统论述力触觉研究现状专著的出现,标志着6自由度力觉生成研究进入新的阶段,但仍存在极多问题需要解决。
国内外相关产品进展
目前国内在相关领域进展缓慢,而国外已经有不少项目致力于将触觉带给VR。在力触觉反馈中,实现力觉反馈要比实现触觉反馈更难,相关项目部分产品存在交叉现象,零镜网暂且根据设备外形进行了简单梳理:
手部套装
微软在力触觉反馈方面进行研究工作从侧面印证了将触觉带给VR的重要性。在不久前,微软发布了用于实现触觉反馈的两款原型控制器,与市面上采取震动提供触觉信息的产品不同,它采用了另一种方式来提供触觉反馈。
两款原型NormalTouch 和 TextureTouch能够让使用者更好地体验虚拟环境。NormalTouch能够让使用者感受到物体的大体形状与物体软硬程度,而TextureTouch能够让使用者感受到物体的细节形状。在穿透补偿实验和追踪实验中,原型控制器展现了较好的实验效果。
Dexmo这款产品与微软的有所不同,它采用手部可穿戴的金属外骨骼来实现手部动作捕捉。但不止于此,通过这套装置以及力反馈功能,它能够让使用者切身感受到握住一样物体,并能够通过虚拟化身实现准确的控制。Dexmo并非单纯的输入装置,而是一个双向的输入输出装置。
Wolverine(金刚狼),听到这个名字会让你想起《X战警》里的金刚狼。这款产品看起来的确与之类似。
研究员Inrak Choi与斯坦福形态实验室的同事共同创造了这款名为“金刚狼”的原型机。当你在虚拟现实中抓取物体时,“金刚狼”将模拟现实中所遭遇的阻力。不仅仅是抓取物体,你甚至能在抓取过程中感受到你抓取的是球体、正方体还是拱状物。通过低功率的滑块和制动系统,为你营造出虚拟现实环境中所遭遇的阻力,无疑将带给你前所未有的体验。
全身套装
单单实现手部的力触觉反馈似乎仍旧不够过瘾。英国开发团队Tesla Studios提供了一款名为Teslasuit的产品,它可以说是世界上首款虚拟现实全身触控体验套件。整套设备包含主控单元T-Belt、T-Glove手套、智能衣等等。
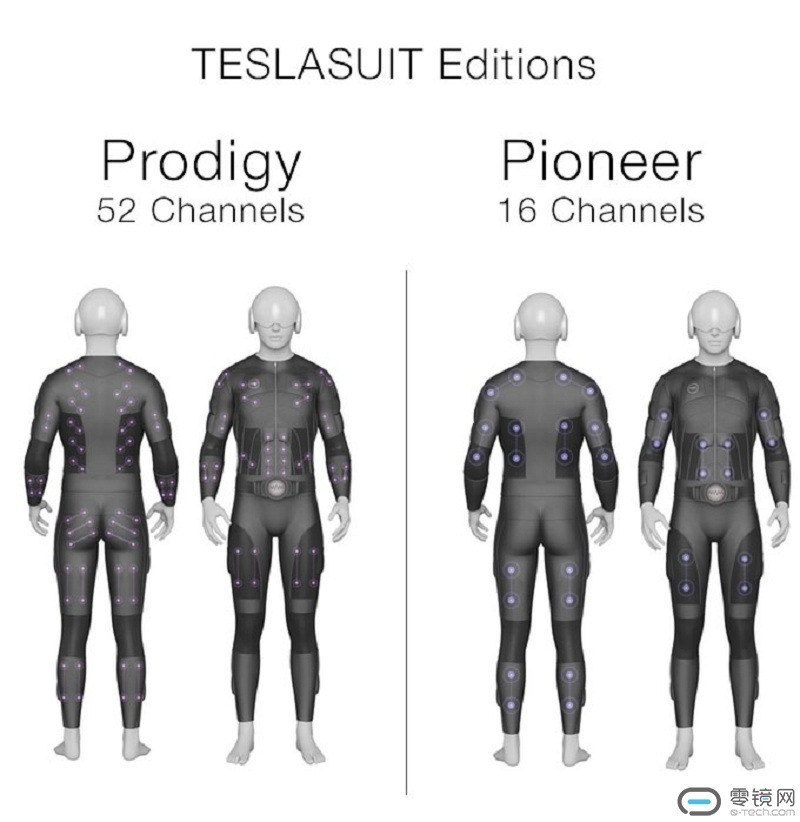
它依靠温和且轻微的电子脉冲刺激身体,从而模拟出各种不同的感觉,使你在虚拟现实世界中真实体验诸如拥抱、被子弹射中、在沙漠中烈日当头等等感觉。无数开车的老司机纷纷表示,这款产品简直就是单身人士的福音。而这款产品另一个特点还在于,能够接入Xbox这样的主机平台,以及手机、电脑、头显等设备。
当然,于上周公布由网易等领投获得580万美元种子轮融资的AxonVR也不容错过。这家于2012年在美国成立的公司,可以说诞生的目的便是让使用者在虚拟现实中能够感受到物体的大小、形状、重量、纹理和温度等。

似乎该款产品与此前提到的Teslasuit看起来并无任何不同。但是原理大相径庭,AxonVR采用的方案与上个世纪登月时代的宇航服类似,外套表面下埋藏着可以提供冷却降温效果的散热塑料水管,除此之外还有负责加热的隔层,以及用压缩空气控制收缩舒张的软管等等。
AxonVR将触觉反馈与力觉反馈分开进行设计。外套解决触觉反馈后,又通过悬挂式的外接动力骨骼解决了力反馈。尽管实际看上去不怎样(下图),但是却具备力反馈功能,动作自由度甚至高出万向跑步机。


零镜观点
以上提到的产品大多处于原型实验阶段,而国内团队在这方面的研究尚存在不足。但我们不难看到,不管是在VR、AR还是在AI中,力触觉反馈都是重要的一环。VR力触觉反馈将在虚拟现实世界里扮演更为重要的角色,这一点毋庸置疑。要实现力触觉反馈,计算机触觉将大显身手。对于一个团队来说,更为重要的掌握核心的技术,不能重蹈头显底层算法缺失的覆辙,掌握力触觉生成算法至关重要。将触觉带给VR,对于建立拟真度更高的虚拟世界是必要的。但是不难看到,这样一套设备的花费价值不菲。正如我们在科幻片中所看到的那样,通过对大脑分析模拟实现力触觉反馈看似是一条更可行的道路。零镜网无疑期盼未来的虚拟世界与现实中的世界一样,在视听触上绝无二致。而2027年VR力触觉反馈的世界,需要VR从业者从现在开始进行钻研,何况国内尚存有大量发展空间。
【本文由零镜网(微信号:ZeroneVR)原创,转载请注明出处!零镜网由多名从业超过10年的资深IT媒体人创立,为VR/AR从业者提供全产业链资源对接,分享前沿技术和应用方案,打造专业硬件评测及VR电竞赛事。】












